완전 자율주행 기술이 실현된 도로 위의 풍경은 꽤 오랜 시간 미래 모빌리티의 상징처럼 그려져 왔다. 운전대를 잡지 않은 상태에서 차량이 스스로 주행하고, 교통사고와 교통 혼잡이 획기적으로 줄어드는 세상을 가리킨다. 다시 말해 자율주행의 실현은 편의성 확보의 문제에서 벗어나 이동이라는 개념 자체를 바꾸고, 안전성과 효율이 비약적으로 높아지는 것을 의미한다.
미국의 경제 단체 USCC(US Chamber of Commerce)는 2023년 발표한 리포트를 통해 자율주행 기술이 사회와 경제 전반에 미칠 영향을 보다 구체적으로 묘사했다. 해당 보고서는 자율주행차가 미국 내 전체 차량의 4분의 1을 대체한다고 가정했을 때, 기본적인(Basic) 자율주행 기술만으로도 매년 약 57만 건의 사고와 5,000명의 사망자를 줄일 수 있다고 추정했다. 여기에 고도화된(Advanced) 자율주행 기술이 도입될 경우 약 144만 건의 사고와 약 1만2,000명의 사망자가 감소하고, 이에 따른 사회적 비용 절감 효과가 약 940억 달러(한화 약 136조 원)에 이를 것으로 분석했다.

엄청난 사회·경제적 편익이 기대되는 자율주행 기술의 실현을 위해 글로벌 모빌리티 기업들은 앞다퉈 기술 실증에 나서고 있다. 여기에 정부 차원의 자금 지원과 디지털 인프라 투자가 더해지며 자율주행 기술에 대한 수요 역시 빠르게 확대되는 추세다. 시장조사 업체 프레시던스 리서치(Precedence Research)는 자율주행차 시장이 연평균 약 35%의 성장률을 기록하며, 2025년 273억 9,000만 달러에서 2032년 2,353억 9,000만 달러 규모로 성장할 것으로 전망했다.
실제로 미국과 중국 등 주요 국가들은 이미 자율주행 기술을 실도로 환경에서 검증하는 단계에 진입했다. 미국에서는 다수의 자율주행 차량이 실제 도로를 주행 중이며, 알파벳(Alphabet)의 웨이모(Waymo)는 2025년을 기준으로 약 2,500대의 로보택시를 운용하며 누적 1,000만 건 이상의 유료 승차 서비스를 제공해 왔다.
중국 역시 정부 주도의 적극적인 투자 아래 자율주행 상용화를 빠르게 확대 중이다. 바이두(Baidu)의 아폴로 고(Apollo Go)는 1,000대 이상의 자율주행 로보택시를 운영하며 베이징·선전·우한 등 주요 도시에서 서비스를 전개 중이며, 월 100만 건 이상의 무인 탑승이 이뤄질 정도로 상용화에 속도를 더하고 있다.

다만 자율주행의 완전한 실현에 도달하기까지 많은 기술적 장벽을 넘어서야 한다. 미국 고속도로교통안전국(National Highway Traffic Safety Administration, NHTSA)이 발표한 자율주행 차량 관련 사고 데이터에서 그 현실적인 문제를 확인할 수 있다. NHTSA의 SGO(Standing General Order) 데이터에 따르면, 2021년 6월부터 2025년 말까지 집계된 자율주행 및 주행 보조 시스템 관련 사고는 총 5,200여 건에 달한다. 이 가운데 약 8.6%는 탑승자 및 보행자의 사상 사고로 이어지며 기술 성숙도와 안전성 측면에서 여전히 해결해야 할 과제가 남아 있음을 보여준다.

수천 건의 사고 중 일부 사례에서는 자율주행 기술이 단순한 오류 개선의 차원을 넘어, 보다 넓은 관점의 안전 개념을 요구하고 있음을 시사한다. 일례로 지난 2023년 미국 샌프란시스코에서는 교차로를 건너던 보행자가 차량에 충돌한 뒤, 로보택시에 하반신이 끼인 채 6m 가량 이동하는 2차 사고가 발생했다. 해당 차량은 정상 작동 중이었음에도, 사고 상황을 인지하지 못한 채 ‘사고 발생 시 갓길로 이동한다’는 기존 로직에 따라 움직였을 뿐이었다.
2018년 미국 애리조나 템피에서 발생한 보행자 사망 사고 역시 유사한 맥락에서 자율주행 기술의 한계를 드러낸다. 당시 자율주행 테스트 차량은 자전거를 끌고 도로를 횡단하던 보행자를 감지했다. 그러나 거리가 가까워지면서 자전거와 보행자를 번갈아 인지해 객체 판단 과정에서 혼선을 겪었다. 미연방교통안전위원회(NTSB)는 이 과정에서 객체의 예상 경로가 초기화되며, 어떠한 회피나 경고 조치 없이 충돌로 이어졌다고 분석했다.
이렇게 실제 도로 환경은 수많은 변수가 동시다발적으로 작용해 학습 데이터로 정의하기 어려운 비정형적 상황이 끊임없이 발생한다. 때문에 자율주행 차량이 복잡한 환경에 완벽히 대응하기 위해서는 객체를 인식하는 것 뿐만 아니라 객체의 상태와 맥락을 종합적으로 해석하고 상황 전체를 판단하는 능력이 필요하다.

자율주행 기술 실현에 이와 같은 기술적 한계가 드러나기 시작하면서 자동차 산업 역시 기존과는 다른 관점의 차량 안전 기준을 필요로 하게 됐다. 이에 유럽 자동차 제조사들을 중심으로 국제표준화기구(International Organization for Standardization, ISO)는 2019년, ‘의도된 기능의 안전(Safety of the Intended Functionality, SOTIF)’을 다루는 국제표준 ISO 21448을 제정했다. 이 표준은 전기·전자 시스템의 고장을 전제로 이중화(Redundancy)와 고장 안전 설계(Fail-Safe) 개념을 정립해 온 ISO 26262와 달리, 시스템이 정상적으로 작동하더라도 판단 범위를 벗어난 상황 자체를 잠재적인 위험 요소로 정의한다.
앞서 살펴본 사고 사례들이 보여주듯, 자율주행 검증이 고도화될수록 안전을 위협하는 요인은 하드웨어나 소프트웨어의 결함이 아닌, 현실 환경의 복잡성과 예측 불가능한 상황에 있다. ISO 21448은 이러한 문제 의식에서 출발하여 기술의 한계로 인해 발생할 수 있는 위험까지 안전의 범주로 확장한 표준이라 할 수 있다.

안전의 관점이 변화함에 따라, 자율주행 기술의 완성도는 현실 도로의 불확실성에 대해 얼마나 폭넓게 가정하고, 체계적으로 대비했는가에 의해 좌우되기 시작했다. 이는 곧 자율주행 시대를 앞둔 자동차 안전성 평가와 개발 전략이 이전보다 다층적인 체계로 재정립되어야 함을 시사한다.
자연스럽게 자동차 안전성 평가는 단순 충돌 시험에서 입체적인 검증 체계로 탈바꿈하고 있다. 전통적인 충돌 시의 탑승자 보호 성능 평가를 바탕으로 하면서, 사고를 사전에 방지하는 성능까지 검증하는 구조로 확장 중이다. 결과적으로 첨단 운전자 보조시스템(Advanced Driver Assistance System, ADAS)과 같은 능동형 안전 기술은 이제 선택 사양이 아닌, 자율주행 시대를 대비한 핵심 평가 요소로 자리 잡았다.

이 가운데 주목되는 변화는 개별 기능의 성능보다 시스템 전체의 통합 안정성을 중시하는 방향이다. 주어진 충돌 상황에 대한 회피 여부는 물론, 복수의 ADAS 기능이 동시에 작동하는 상황에서 회피 성능의 일관성을 확보하는 것이 중요해졌다. 특히 센서 간 데이터가 정확히 융합된 후의 제어 여부, 그리고 운전자의 개입이 필요한 순간에 명확한 경고와 제어권의 매끄러운 전환이 핵심 검증 요소로 부상하고 있다. 자율주행 차량 사고의 주요 원인이 하드웨어의 단순 결함보다 복합적인 시스템 상호작용의 오류나 불완전한 제어권 전환에서 비롯된다는 분석이 주효했다.
평가 환경 역시 점점 현실 도로에 가까워지고 있다. 악천후나 야간 주행, 복잡한 도심 교차로, 보행자 돌발 상황 등 실제 교통 환경을 모사한 복합 시나리오에서의 대응 능력을 시험한다. 여기에 소프트웨어 오류나 센서 이상 등 예기치 못한 간섭 상황에서도 위험을 최소화하며 안전한 상태로 전환하는 페일 세이프와 시스템 이중화 개념까지 평가 범위에 포함될 전망이다.

실제로 글로벌 주요 신차 평가 프로그램(New Car Assessment Program, NCAP)의 평가 체계 변화를 통해 이와 같은 흐름을 확인할 수 있다. 일례로 IIHS(미국 고속도로안전보험협회)는 ADAS 기술 평가 도입 초기, 차량 대상의 전방 충돌 회피 성능만 판가름했다면, 이후에는 변별력을 높이고 ADAS 기술의 고도화를 위해 평가 기준을 지속적으로 강화하고 있다. 가령 보행자 평가에서는 성인과 아동을 구분하고, 주간과 야간 환경을 분리해 평가한다. 차 대 차 충돌 방지 역시 속도 및 차량 위치에 따라 시나리오를 세분화했다.
최근에는 운전자가 순간적으로 식별하기 어려운 모터사이클이나 일반 승용차와 형상이 크게 다른 세미 트레일러까지 평가 대상에 포함시켜, 다양한 크기와 형태의 객체를 정확히 인지할 수 있는 능력을 검증하고 있다. 요컨대 단순한 충돌 회피 뿐 아니라 복잡한 도로 환경에서 다양한 객체를 정확히 ‘인지’하고 상황을 올바르게 ‘판단’한 후, 차량을 정밀하게 ‘제어’하는 종합 평가 과정으로 변화 중이다.
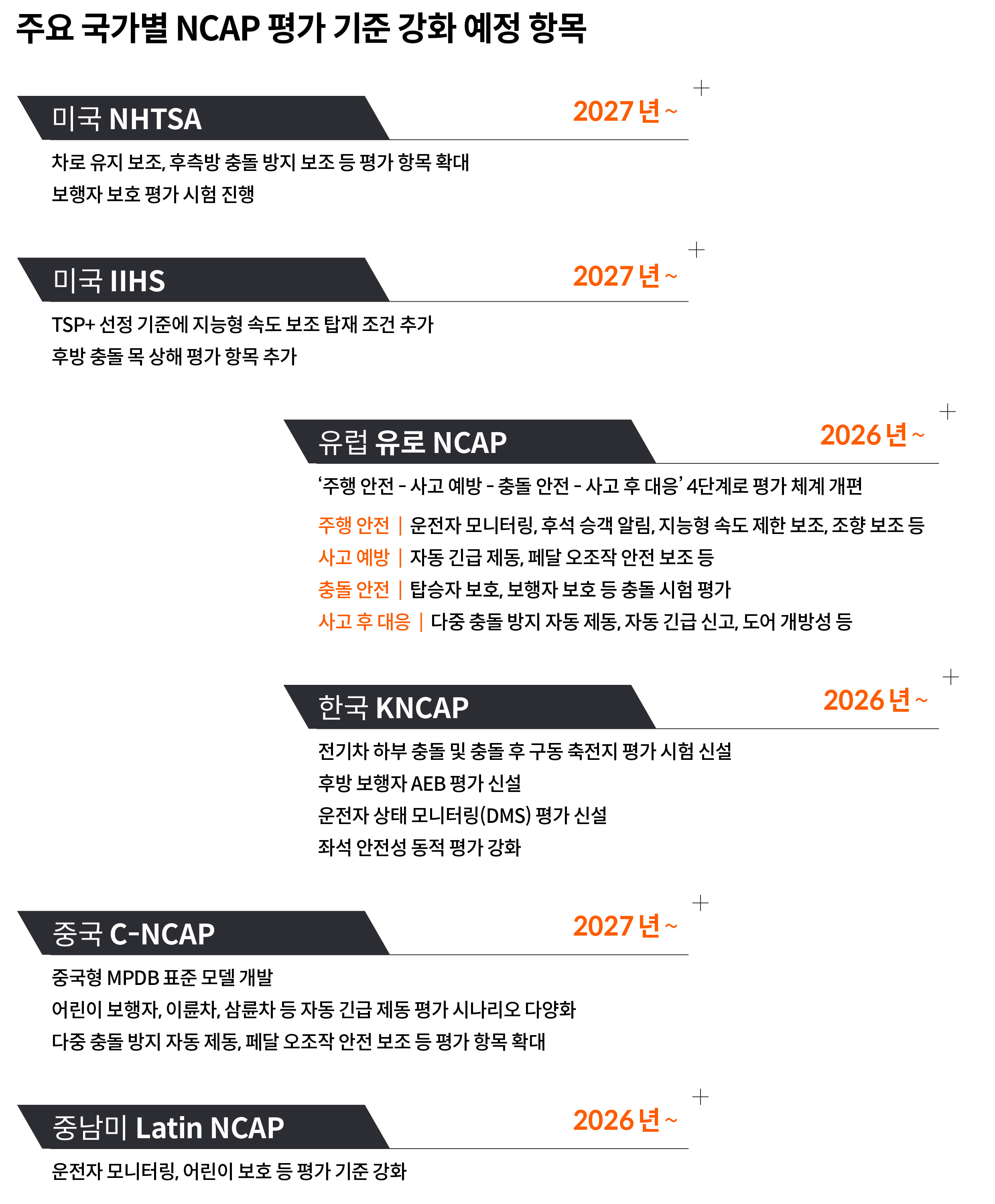
글로벌 주요 NCAP 주관 기구들은 흐름에 발맞춰 일제히 강화된 평가 시행을 예고했다. 우선 미국 NHTSA는 2027년 평가 항목에 차로 유지 보조와 후측방 충돌 방지 보조를 추가하고 보행자 관련 평가를 신규 도입해 사고 예방 안전 성능에 대해 철저히 평가하겠다는 의지를 보였다. 한편 IIHS는 2027년부터 지능형 속도 보조(Intelligent Speed Assistance) 항목과 후방 충돌 시 탑승자의 목 상해 평가(Whiplash Prevention) 항목을 추가할 예정이다.
유로 NCAP은 올해 평가 체계를 전면 수정하며 가장 큰 변화를 맞이한다. 기존 평가 항목을 실제 사고 발생 흐름에 맞춰 ‘주행 안전 – 사고 예방 – 충돌 안전 – 사고 후 안전’으로 재구성한다. 사고 이전부터 이후 구조 단계까지 전 과정을 아우르는 평가 체계를 제시해 제조사들에게 전방위 안전 기술 확보를 유도한다는 방침이다.
우리나라 국토교통부가 주관하는 KNCAP도 평가 체계의 격변을 예고했다. 올해부터 전기차 하부 충돌과 충돌 이후의 구동 축전지 평가를 새로이 시행하면서, 좌석 안전성 동적 평가에 시속 24km 충격 조건을 추가했다. 또한 운전자 상태 모니터링(Driver Monitoring System, DMS) 평가와 후진 시 보행자 보호를 위한 AEB 평가를 신설해 사고 예방 성능의 변별력을 크게 높인다.
이 외에도 중국의 C-NCAP은 2027년까지 자동 긴급 제동 관련 평가 시나리오를 어린이 보행자, 이륜차, 삼륜차 등으로 확대하고 다중 충돌 방지 자동 제동, 페달 오조작 안전 보조 등 평가 항목을 다양화할 예정이다. 라틴 NCAP의 경우 올해부터 운전자 모니터링을 평가 항목에 포함하고 어린이 보호 평가 기준도 강화해 남미 시장의 전반적인 차량 안전성 향상을 의도하고 있다.

지속적으로 변화하고 있는 NCAP 평가 항목은 자율주행에 가까운 상황에서의 대응 능력을 단계적으로 검증하려는 의도로 해석된다. 이처럼 자동차 산업에 요구되는 안전 성능의 혹독한 기준 강화가 이뤄지는 가운데, 현대자동차그룹은 주요 NCAP에서 꾸준히 우수한 성적을 기록해 온 대표적인 자동차 제조사다.
현대차그룹은 평가 기준 변화에 사후 대응하는 방식이 아닌, 강화되는 기준을 개발 단계에서 선제적으로 반영해 온 검증 체계와 개발 프로세스를 이어오고 있다. 또한 개별 안전 사양의 성능 뿐만 아니라 자율주행 기술 실현 이전, 인지–판단–제어 전 과정을 아우르는 ADAS 시스템 전반의 최적화를 목표로 삼았다.

현대차그룹의 기술 개발 방향은 최근 IIHS의 차량 안전도 평가에서 세운 2년 연속 최다 선정 기록에서도 확인할 수 있다. 해당 평가에서 현대차그룹은 소형 SUV인 현대차 코나부터 대형 세단인 제네시스 G80에 이르기까지 다양한 차종이 모두 최고 수준의 안전 성능을 기록했다. 실제로 현대차그룹은 거의 모든 차종에 걸쳐 동일한 안전 기준을 적용하기 위해 ADAS 작동 과정을 차량 특성에 맞게 정교하게 조율하고, 성능 편차를 최소화하는 방향으로 시스템을 최적화해 왔다.
나아가 개발 과정에서 모든 차량이 어떠한 주행 환경에서도 최고의 승객 안전과 능동 안전 성능을 제공할 수 있도록 차량별 제동 및 조향 특성을 고려한 시스템 단위의 제어 성능 고도화에 역량을 쏟고 있다. 이와 더불어 수많은 주행 시나리오를 바탕으로 인식 및 제어 성능을 반복적으로 검증함에 따라, 차급과 관계없이 동일한 시험 조건에서도 최고 수준의 안전성을 확보할 수 있었다.
아이오닉 9의 주간 시속 60km, 일반 차량 대상 FCP 2.0 자체 평가 영상
또한 올해 시행 예정인 IIHS의 강화된 전방 충돌 예방(Front Collision Prevention, FCP 2.0) 평가에 앞서, 현대차그룹은 이미 관련 테스트 환경을 구축하고 기술 검증을 진행해 왔다. 개정되는 FCP 2.0 평가의 주요 골자는 더 높은 주행 속도에서의 사고 대응과 더불어, 충돌 대상의 확대를 통해 실제 주행 환경과의 괴리를 좁히는 데 있다.
IIHS는 평가 속도를 시속 50, 60, 70km로 세분화하면서 충돌 2.1초 이전에 경고 신호를 보내 사고를 예방하도록 재구성했다. 현대차그룹의 테스트 영상에서도 알 수 있듯 강화된 IIHS 평가는 충돌 회피 여부에만 집중하지 않고, 더 다양한 조건에서도 일정 시간 이상의 대응 시간을 확보해 사고를 사전에 차단하겠다는 의도를 담고 있다.
아이오닉 9의 주간 시속 60km, 모터사이클 대상 FCP 2.0 자체 평가 영상
모터사이클 정차 조건에서도 일정 속도에서의 충돌 경고 시점과 속도 저감량을 확인해 예방 성능에 따라 등급을 평가한다. 일반 차량 평가와 마찬가지로 모터사이클 위치를 차로 정중앙 및 좌우측에 치우친 위치로 변경해가며 다양한 속도에서 ADAS의 객체 인식 성능을 평가한다.
아이오닉 9의 주간 시속 70km, 세미 트레일러 대상 FCP 2.0 자체 평가 영상
IIHS는 사고 발생 시 더 큰 피해를 입는 대형 차량과의 사고에도 대응하기 위해 올해부터 세미 트레일러 대상 시나리오도 추가한다. 여기에는 북미에서 흔하게 볼 수 있는 규격의 트레일러 더미를 사용하며, 다른 시험과는 달리 충돌 경고 시점만을 평가 기준으로 삼는다. 모터사이클과 트레일러 대상 테스트는 실제 도로에서 승용차 뿐만 아니라 커다란 상용차와 캐러밴, 모터사이클 등이 얽혀 달리는 만큼 평가 대상을 구체화하겠다는 의도로 풀이된다.
아이오닉 5의 주간 시속 40km, 횡단 보행자 대상 AEB 자체 평가 영상
보행자 자동 긴급 제동(Pedestrian Automatic Emergency Braking, PAEB) 평가는 시속 20, 40km 주행 조건에서 정차된 차량 뒤로 어린이가 튀어나오는 상황의 대응 과정을 살핀다. 일상에서 어렵지 않게 발생하는 상황을 가정해 주간임에도 시야가 제한된 환경의 위험성을 보여주는 테스트다.
아이오닉 5의 야간 시속 40km, 도로 횡단 보행자 대상 AEB 자체 평가 영상
아이오닉 5의 야간 시속 60km, 도로 중앙 보행자 대상 AEB 자체 평가 영상
야간 보행자 평가는 시속 20, 40, 60km 주행 조건에서 도로에 서 있는 보행자 더미와 도로를 횡단하는 보행자 더미를 상대로 진행된다. 하향등과, 상향등까지 각각 켠 상태에서 모두 보행자 인식과 대응이 이뤄져야 한다. 야간에는 운전자의 시야가 크게 줄어드는 만큼, ADAS의 높은 객체 인식 성능과 대응 과정을 통해 야간 보행자 사고를 줄이겠다는 의도다. 평가 내용이 실제 주행 환경과 더 유사한 조건을 조성하고 있는 상황에서 현대차그룹은 지난해 상반기부터 사전 검증을 수행했으며, 강화되는 기준을 충족하는 기술 완성도를 확보한 상황이다.

현대차그룹은 사고 예방 기술을 더욱 다양한 환경에서 검증하려는 노력을 기울이고 있다. 기존 테스트 환경에서 구현하기 어렵거나, 실제 도로에서 반복 검증하기 힘든 위험 상황을 가상 환경에서 재현해 ADAS의 기술 신뢰도를 높이는 시뮬레이션 검증 평가가 그 일환이다.
유로 NCAP은 실차 시험 결과와 시뮬레이션 결과 간의 정합성을 공식적으로 평가하는 VTA(Virtual Testing Active Safety) 항목 도입을 예고한 바 있다. 실차 시험을 기준점으로 동일 조건의 시뮬레이션 결과가 차량 거동과 제어 특성 측면에서 얼마나 일치하는지를 검증하며, 이 과정에서 실차와 시뮬레이션 결과의 시간 기반 곡선 일치도를 측정하는 ‘ISO Score’를 충족해야만 시뮬레이션 결과를 공인 검증 자료로 활용할 수 있다.
현대차그룹은 유로 NCAP 평가 체계에 선제적으로 대응하는 동시에, 자율주행 기술 고도화를 목표로 사고 예방 시나리오 전 범위를 가상 환경으로 이식한 시뮬레이션 기반 평가를 이미 수행 중이다. ADAS 및 자율주행 성능 검증 과정에서 실차 시험과 시뮬레이션 결과 간의 정합성을 엄격히 검증함으로써, 사고 예방 시나리오 전반의 기술 완성도를 점검한다.
신뢰성을 확보한 시뮬레이션 환경은 실차로는 반복하기 어렵거나 안전상 부담이 큰 고위험 시나리오까지 검증 범위를 확장하는 기반이 된다. 가상 환경에서 수많은 상황을 검증함으로써 사고 가능성을 사전에 발굴하고 개선하는 구조다. 현대차그룹은 이처럼 신뢰성이 확보된 시뮬레이션을 활용해 실제 도로 환경에서는 검증이 어려운 상황까지 평가 범위를 넓히며 ADAS 및 자율주행 기술 성능 검증의 효율성과 완성도를 동시에 높여가고 있다.

자율주행 기술의 신뢰도는 폐쇄된 시험 환경이 아닌, 실제 도로에서의 수많은 검증에 의해 축적된다. 현대차그룹은 일찍이 자체 자율주행 솔루션을 활용해 서울 일부 지역을 비롯한 복잡한 도심 환경에서 기술 실증 작업을 진행 중이다. 또한 최근에는 도로에서의 돌발 상황과 변수에 대한 대응력을 높이기 위해 인지·판단·제어 전 과정을 하나의 흐름으로 연결하는 E2E(End-to-End) 기술을 도입했다. E2E는 센서 입력부터 차량 제어까지 통합 모델로 학습시키는 자율주행 방식으로, 시스템이 도로 상황을 하나의 맥락으로 이해하고 판단한다.

올해 말, 미국 라스베이거스에서 상용화를 앞둔 모셔널(Motional)의 로보택시가 E2E 방식의 고도화된 자율주행 솔루션을 탑재했다. 모셔널은 복잡한 교차로와 보행자 통행이 잦은 도심 주행 데이터를 축적하며 실제 교통 환경에서도 일관된 안전성을 확보하는 데 집중하고 있다.
이를 위해 모셔널은 NHTSA가 제정한 연방 자동차 안전기준(Federal Motor Vehicle Safety Standard, FMVSS)을 바탕으로 차량과 시스템을 개발하고, 기술 개발 과정에서 독일 대표 시험인증기관인 ‘티유브이 슈드(Technischer Überwachungsverein Süd, TÜV SÜD)’ 등 독립 검증기관 평가를 포함한 다수의 엄격한 안전 검증 절차를 거쳤다. 현대차그룹은 향후에도 글로벌 테스트 표준에 맞춰 기술 검증 수준을 단계적으로 높여 나갈 계획이다.

나아가 현대차그룹은 포티투닷(42dot)과 함께 자율주행과 SDV(Software Defined Vehicle, 소프트웨어 중심으로 진화하는 자동차) 기술 고도화에 속도를 내고 있다. 아울러 로보틱스 랩 설립과 보스턴 다이나믹스 인수를 통해 자동차 제조사 가운데 선제적으로 로보틱스 기술의 저변을 확장하고 있다. 이를 바탕으로 최근에는 자율주행 기술과의 융합으로 피지컬 AI 구현을 위한 기술적 기반을 구축하고 있다. 뿐만 아니라 미래 모빌리티 기술 내재화를 목표로 R&D 및 AVP 조직을 중심으로 전문 인력을 지속적으로 확보 중이다.

상용차 자율주행 기술의 가능성도 꾸준히 진단하고 있다. 현대차그룹은 수소전기 대형트럭인 엑시언트 FCEV에 자율주행 시스템을 적용해 보다 정교하고 선제적인 제어가 요구되는 대형 상용차 환경의 기술 실증을 진행 중이다. 이를 통해 효율적인 물류 운송 시스템의 실현 가능성을 진단하고, 가혹한 조건에서도 일관된 안전성을 구현하고자 기술 역량을 집중하고 있다.
이처럼 자율주행 기술 실현을 향한 현대차그룹의 철저한 사전 검증과 다각적인 행보는 글로벌 모빌리티 기업으로서, 도심 골목부터 광활한 고속도로에 이르기까지 모든 도로 영역에서 안전한 자율주행 생태계를 구축하겠다는 의지를 담고 있다.

해마다 현실의 도로 상황과 가까워지고 있는 글로벌 NCAP 기관들의 평가 기준은 자율주행 기술의 실현과 함께 차량 안전 기술 발전의 가장 강력한 동력이 되고 있다. 기준이 강화될수록 제조사들은 더 정교한 성능과 신뢰할 수 있는 기술을 개발하는 데 주력하고 있다.
이 상황에서 현대차그룹이 복잡하고 다양한 도로 환경에서 자율주행 기술의 상용화를 빠르게 추진할 수 있는 것은, 고객의 이동 편익을 목표로 선제적인 기술 개발과 폭넓은 검증 체계를 꾸준히 구축해 온 결과다. 현대차그룹은 앞으로도 뛰어난 주행 편의 기술과 사고 예방 성능 확보를 통해 모든 고객이 최고의 이동 경험을 누릴 수 있도록 첨단 운전자 보조시스템의 고도화와 자율주행 기술 실현을 향한 발걸음을 멈추지 않을 예정이다.